
参数卸载#
📖 概述#
Lightx2v 实现了先进的参数卸载机制,专为在有限硬件资源下处理大型模型推理而设计。该系统通过智能管理不同内存层次中的模型权重,提供了优秀的速度-内存平衡。
核心特性:
分block/phase卸载:高效地以block/phase为单位管理模型权重,实现最优内存使用
Block:Transformer模型的基本计算单元,包含完整的Transformer层(自注意力、交叉注意力、前馈网络等),是较大的内存管理单位
Phase:Block内部的更细粒度计算阶段,包含单个计算组件(如自注意力、交叉注意力、前馈网络等),提供更精细的内存控制
多级存储支持:GPU → CPU → 磁盘层次结构,配合智能缓存
异步操作:使用 CUDA 流实现计算和数据传输的重叠
磁盘/NVMe 序列化:当内存不足时支持二级存储
🎯 卸载策略#
策略一:GPU-CPU 分block/phase卸载#
适用场景:GPU 显存不足但系统内存充足
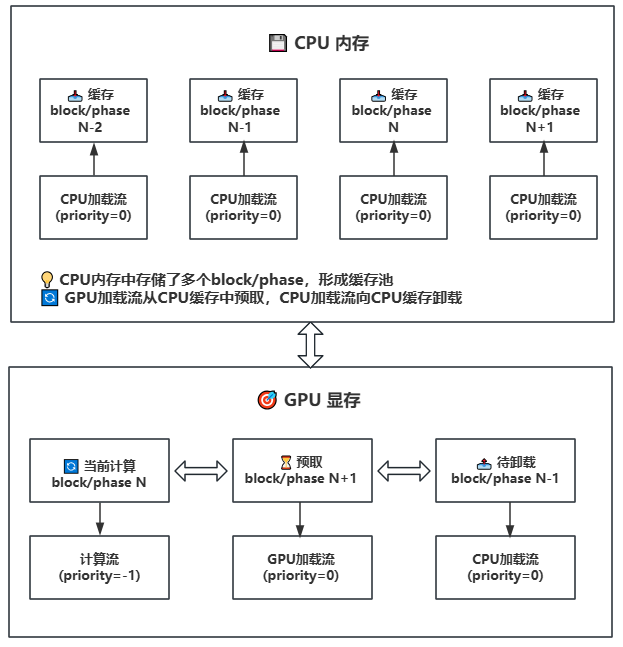
工作原理:在 GPU 和 CPU 内存之间以block或phase为单位管理模型权重,利用 CUDA 流实现计算和数据传输的重叠。Block包含完整的Transformer层,而Phase则是Block内部的单个计算组件。
Block vs Phase 说明:
Block粒度:较大的内存管理单位,包含完整的Transformer层(自注意力、交叉注意力、前馈网络等),适合内存充足的情况,减少管理开销
Phase粒度:更细粒度的内存管理,包含单个计算组件(如自注意力、交叉注意力、前馈网络等),适合内存受限的情况,提供更灵活的内存控制
关键特性:
异步传输:使用三个不同优先级的CUDA流实现计算和传输的并行
计算流(priority=-1):高优先级,负责当前计算
GPU加载流(priority=0):中优先级,负责从CPU到GPU的预取
CPU加载流(priority=0):中优先级,负责从GPU到CPU的卸载
预取机制:提前将下一个block/phase加载到 GPU
智能缓存:在 CPU 内存中维护权重缓存
流同步:确保数据传输和计算的正确性
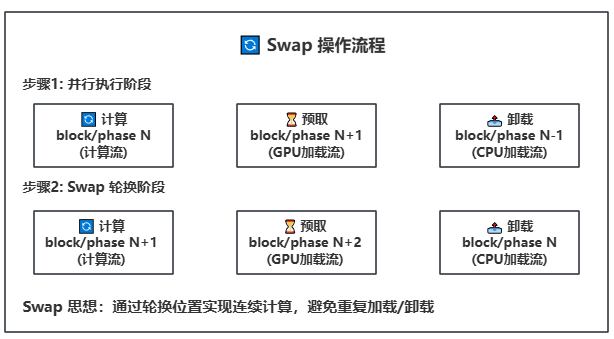
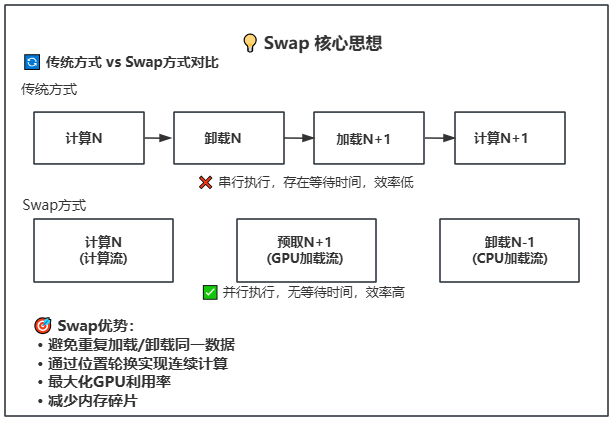
Swap操作:计算完成后轮换block/phase位置,实现连续计算
策略二:磁盘-CPU-GPU 分block/phase卸载(延迟加载)#
适用场景:GPU 显存和系统内存都不足
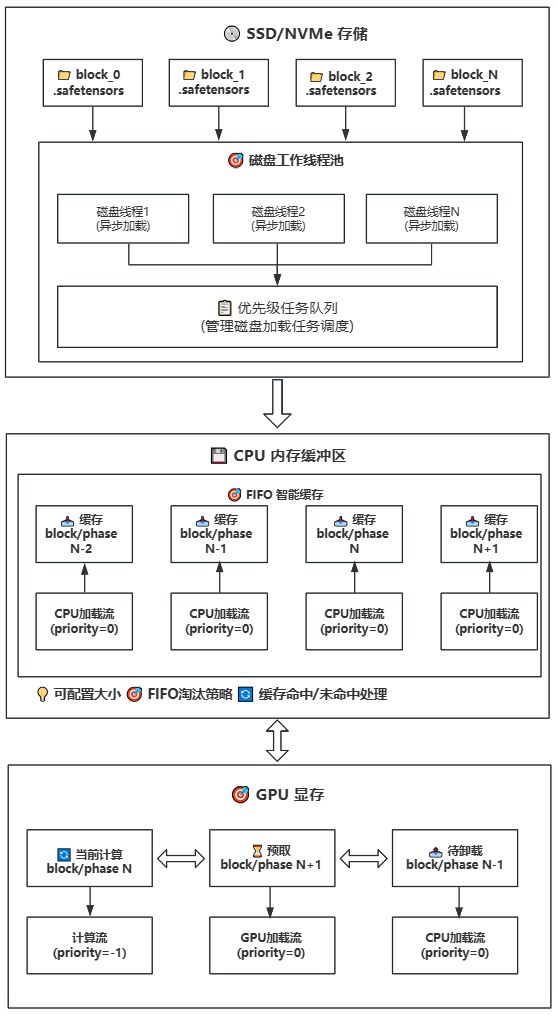
工作原理:在策略一的基础上引入磁盘存储,实现三级存储层次(磁盘 → CPU → GPU)。CPU继续作为缓存池,但大小可配置,适用于CPU内存受限的设备。
关键特性:
延迟加载:模型权重按需从磁盘加载,避免一次性加载全部模型
智能缓存:CPU内存缓冲区使用FIFO策略管理,可配置大小
多线程预取:使用多个磁盘工作线程并行加载
异步传输:使用CUDA流实现计算和数据传输的重叠
Swap轮换:通过位置轮换实现连续计算,避免重复加载/卸载
工作步骤:
磁盘存储:模型权重按block存储在SSD/NVMe上,每个block一个.safetensors文件
任务调度:当需要某个block/phase时,优先级任务队列分配磁盘工作线程
异步加载:多个磁盘线程并行从磁盘读取权重文件到CPU内存缓冲区
智能缓存:CPU内存缓冲区使用FIFO策略管理缓存,可配置大小
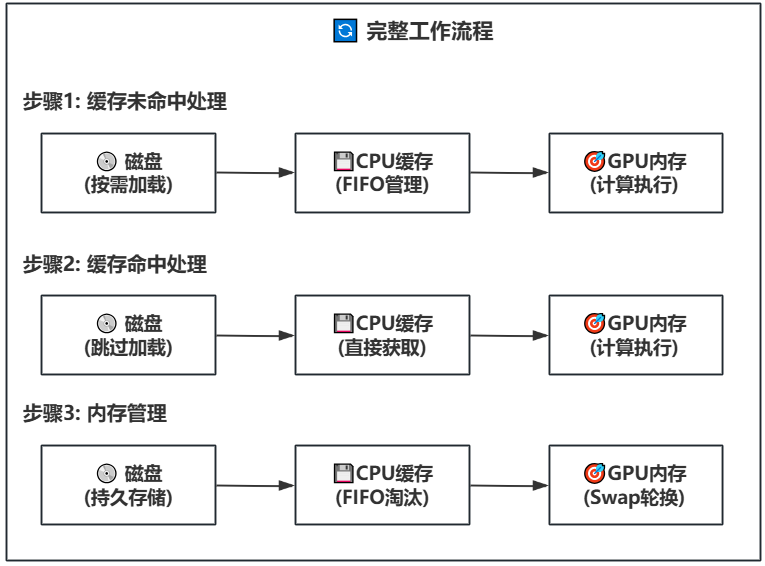
缓存命中:如果权重已在缓存中,直接传输到GPU,无需磁盘读取
预取传输:缓存中的权重异步传输到GPU内存(使用GPU加载流)
计算执行:GPU上的权重进行计算(使用计算流),同时后台继续预取下一个block/phase
Swap轮换:计算完成后轮换block/phase位置,实现连续计算
内存管理:当CPU缓存满时,自动淘汰最早使用的权重block/phase
⚙️ 配置参数#
GPU-CPU 卸载配置#
config = {
"cpu_offload": True,
"offload_ratio": 1.0, # 卸载比例(0.0-1.0)
"offload_granularity": "block", # 卸载粒度:"block"或"phase"
"lazy_load": False, # 禁用延迟加载
}
磁盘-CPU-GPU 卸载配置#
config = {
"cpu_offload": True,
"lazy_load": True, # 启用延迟加载
"offload_ratio": 1.0, # 卸载比例
"offload_granularity": "phase", # 推荐使用phase粒度
"num_disk_workers": 2, # 磁盘工作线程数
"offload_to_disk": True, # 启用磁盘卸载
}
智能缓存关键参数:
max_memory:控制CPU缓存大小,影响缓存命中率和内存使用num_disk_workers:控制磁盘加载线程数,影响预取速度offload_granularity:控制缓存粒度(block或phase),影响缓存效率"block":以完整的Transformer层为单位进行缓存管理"phase":以单个计算组件为单位进行缓存管理
非 DIT 模型组件(T5、CLIP、VAE)的卸载配置:
这些组件的卸载行为遵循以下规则:
默认行为:如果没有单独指定,T5、CLIP、VAE 会跟随
cpu_offload的设置独立配置:可以为每个组件单独设置卸载策略,实现精细控制
配置示例:
{
"cpu_offload": true, // DIT 模型卸载开关
"t5_cpu_offload": false, // T5 编码器独立设置
"clip_cpu_offload": false, // CLIP 编码器独立设置
"vae_cpu_offload": false // VAE 编码器独立设置
}
在显存受限的设备上,建议采用渐进式卸载策略:
第一步:仅开启
cpu_offload,关闭t5_cpu_offload、clip_cpu_offload、vae_cpu_offload第二步:如果显存仍不足,逐步开启 T5、CLIP、VAE 的 CPU 卸载
第三步:如果显存仍然不够,考虑使用量化 + CPU 卸载或启用
lazy_load
实践经验:
RTX 4090 24GB + 14B 模型:通常只需开启
cpu_offload,其他组件卸载需要手动设为false,同时使用 FP8 量化版本更小显存的 GPU:需要组合使用量化、CPU 卸载和延迟加载
量化方案:建议参考量化技术文档选择合适的量化策略
配置文件参考:
Wan2.1 系列模型:参考 offload 配置文件
Wan2.2 系列模型:参考 wan22 配置文件 中以
4090结尾的配置文件
🎯 使用建议#
🔄 GPU-CPU分block/phase卸载:适合GPU显存不足(RTX 3090/4090 24G)但系统内存(>64/128G)充足
💾 磁盘-CPU-GPU分block/phase卸载:适合GPU显存(RTX 3060/4090 8G)和系统内存(16/32G)都不足
🚫 无Offload:适合高端硬件配置,追求最佳性能
🔍 故障排除#
常见问题及解决方案#
磁盘I/O瓶颈
解决方案:使用NVMe SSD,增加num_disk_workers
内存缓冲区溢出
解决方案:增加max_memory或减少num_disk_workers
加载超时
解决方案:检查磁盘性能,优化文件系统
注意:本卸载机制专为Lightx2v设计,充分利用了现代硬件的异步计算能力,能够显著降低大模型推理的硬件门槛。